
Adding wheel encoders to WallBot ended up being more work than I thought. I ended up writing all the code from scratch but it meant I learnt a lot about encoders and timer interrupts on the microcontroller.
WallBot got a new motor controller and quadrature encoders.
Integrating the new motor controller raises some software issues….

Next version of WallBot.
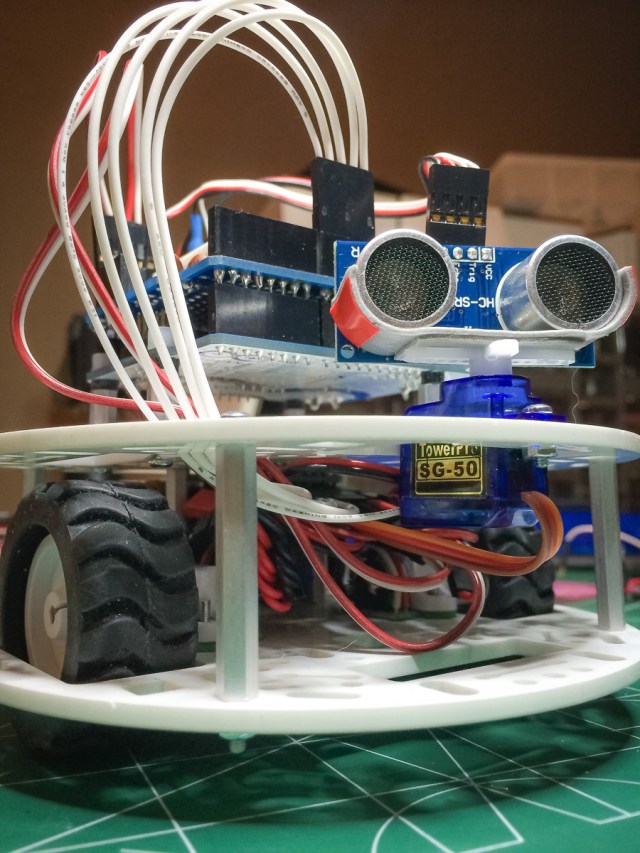
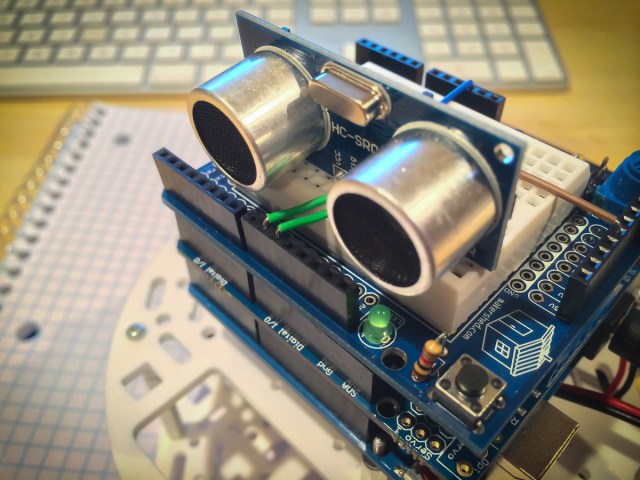
Mounted the sonic sensor onto a servo to provide better wall detection and handing. Managed to also slim down Wallie’s profile.
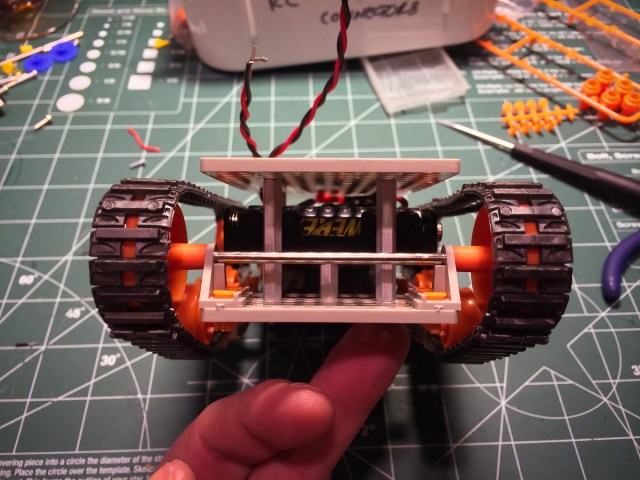
While searching for a chassis for my two-wheeled bot I came across an inexpensive track chassis from Tamiya.

While attending the PDXElectroHax meet up I was told about a project that was getting underway to do with building a UAV to help protect rhinos in South Africa from poachers.
There was going to be a kind of kick-off meeting on Saturday and would I be interested in attending it?
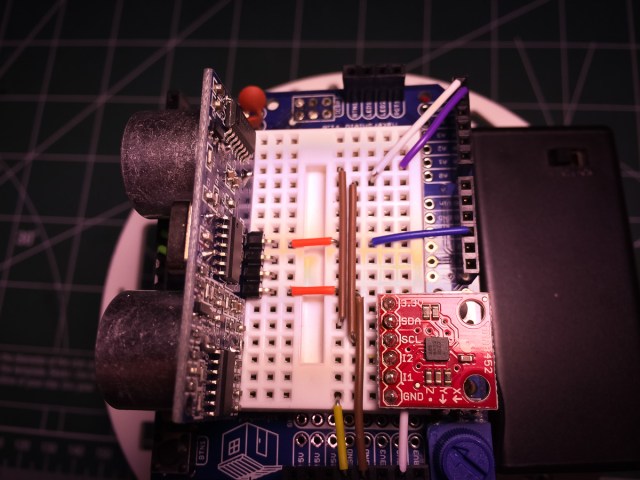
I was hoping to add an accelerometer to Wallie to help detect collisions with obstacles. Alas it’s not to be. I had purchased a breakout board for the MMA8452Q accelerometer from sparkfun. It was on clearance at the time so I bought it on a whim. Luckily it’s one of the more sensitive accelerometers (2g) […]
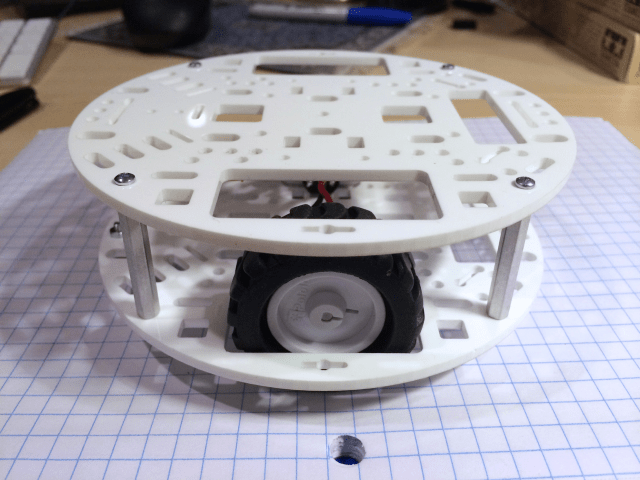
The start of my two-wheeled robot project: Building the chassis from Pololu.
Servorator is an open source Arduino library, providing sophisticated speed control for servos, that I wrote for my Robix arm project in order to creating smoother movements.
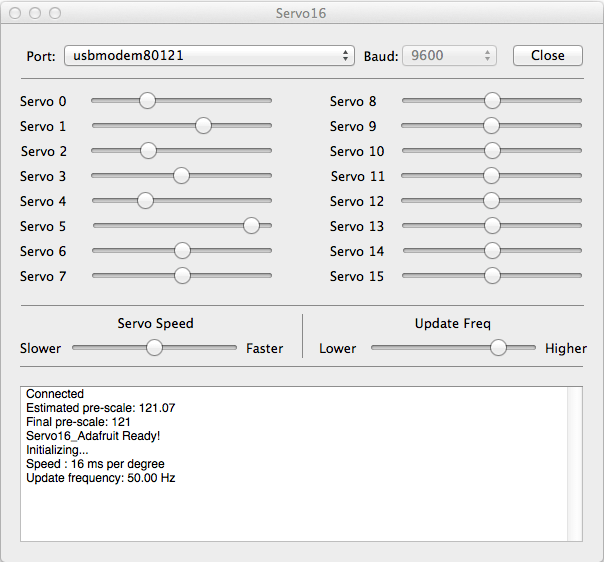
Now that I have the servo shield working I went ahead and created my first OSX app to control the servos from my desk top. It’s a very simple app. There’s a slider for each of the 16 servos. Changing the sliders causes commands to be sent to the selected serial port. On the Arduino […]
