Tag Archives: quadrature
PID Tuning For Zumo
With the encoders working it’s time to tune the PID controller for driving in straight lines.
Building Zumo – Part III
Completed the Zumo hardware side and got the encoders working but then hit a road block trying to get the motors to turn…

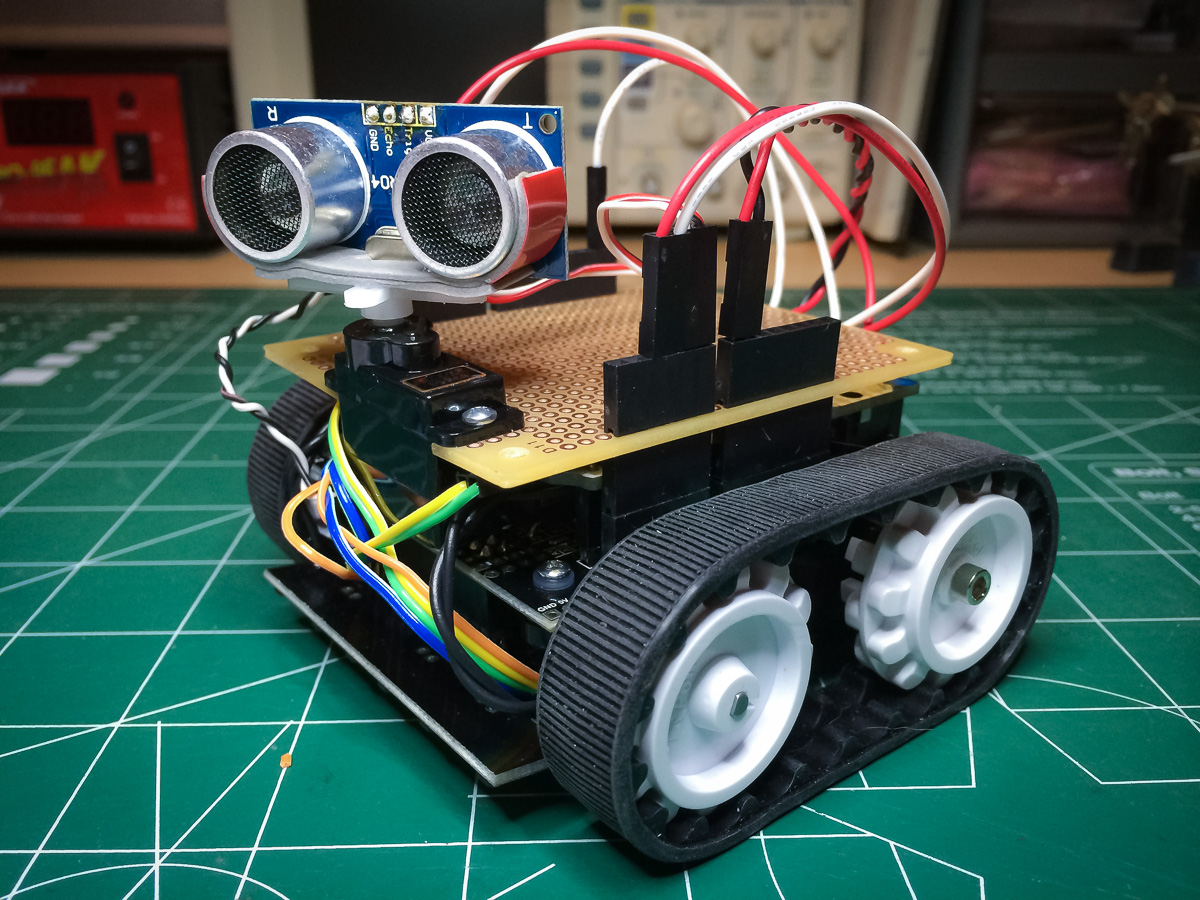
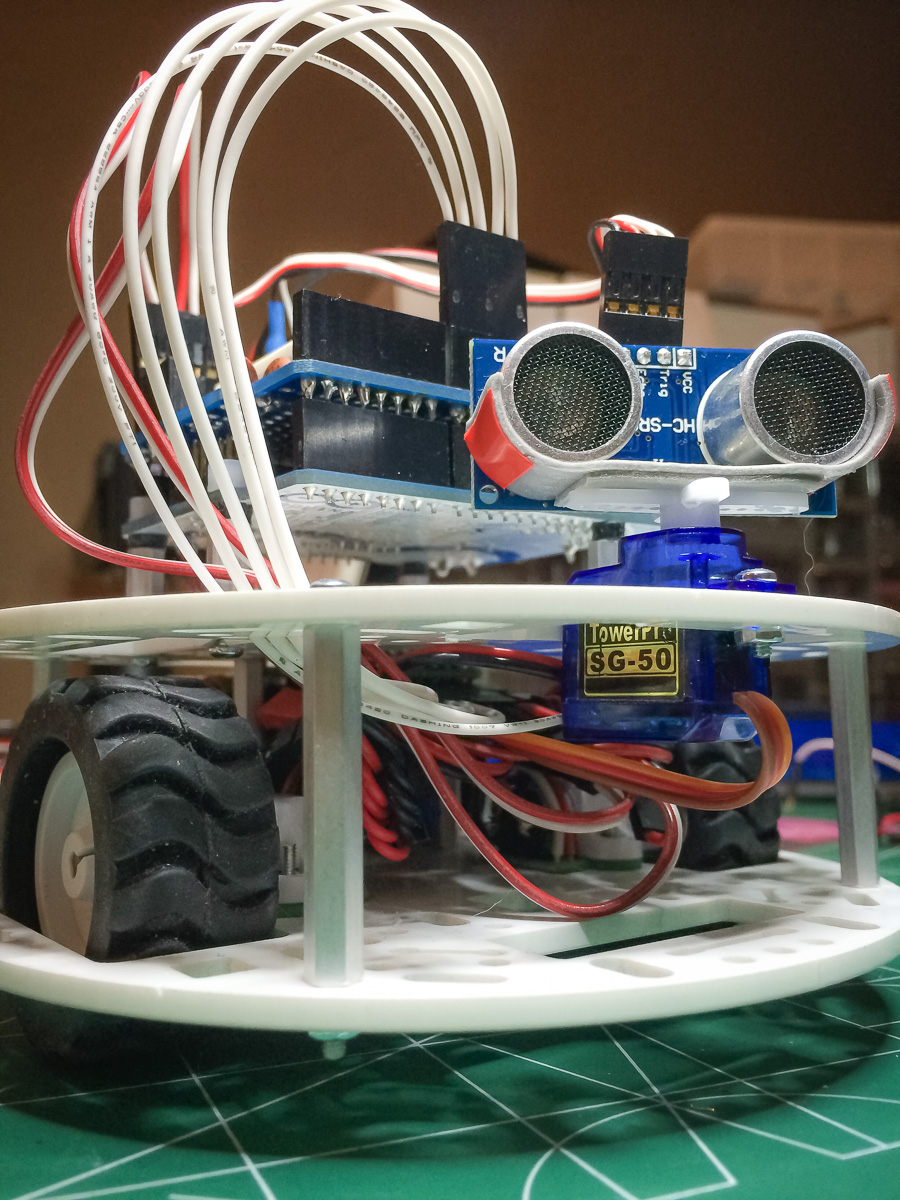
Say Hello To My Little Friend – Zumo Part I
Decided to build the Pololu Zumo chassis with their optical encoders.
Still need to figure out a circuit to convert the encoders’ analog signal to digital.

Data vs Reality
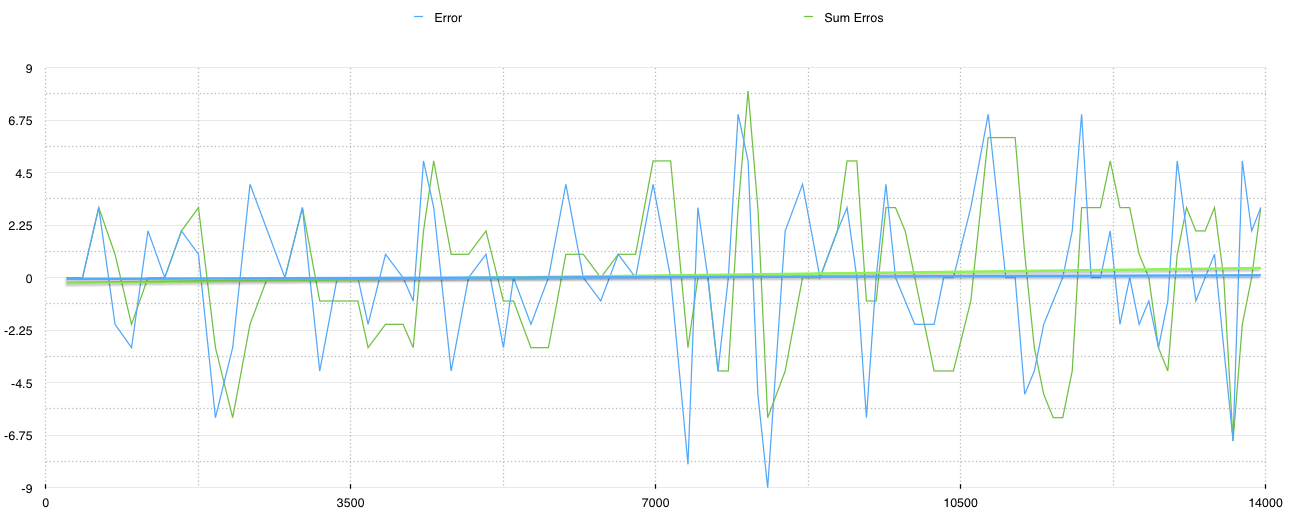
I’ve implemented a PID-based closed-loop system to ensure my bot travels in a straight line.
The data says it is going straight, however, in reality it seems to be deviating quite a bit.
Mighty confused.

Wheel Encoders For WallBot
Adding wheel encoders to WallBot ended up being more work than I thought. I ended up writing all the code from scratch but it meant I learnt a lot about encoders and timer interrupts on the microcontroller.
WallBot – Version 2.5
WallBot got a new motor controller and quadrature encoders.
Integrating the new motor controller raises some software issues….
