Tag Archives: umbmark
NavBot: Version 1
First true working version of the NavBot.
I show how you can get the code up and running on your own mobile robot, configure and calibrate it for errors and create your own waypoint based path sequences for the Pilot to execute.
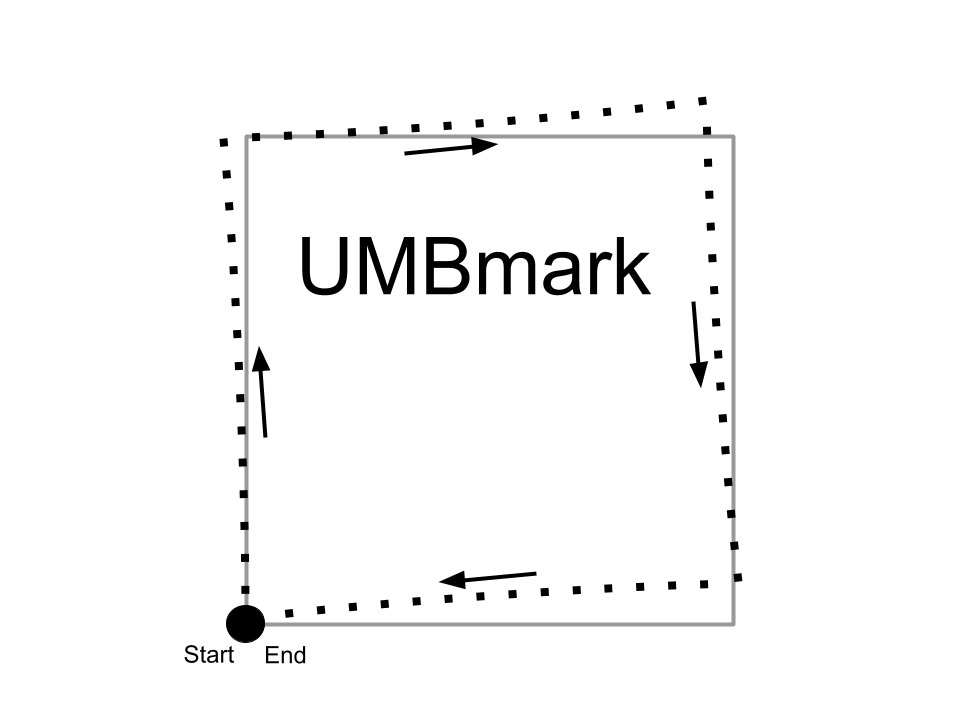
NavBot: Measuring and Correcting Systematic Errors with the UMBmark Test
Finally got a handle on dealing with NavBot’s key systematic errors. My ad hoc approach was proving very frustrating. The UMBmark method is simple to perform and gives great results.
