Tag Archives: error
NavBot: Calibration
[This is a breakout post for NavBot: Version 1 where I show how to get the NavBot project to run on your own robot.] In a previous post I detailed some of the systematic errors typical for differential type robots and how to correct for them. In this post I’m simply going to show how […]
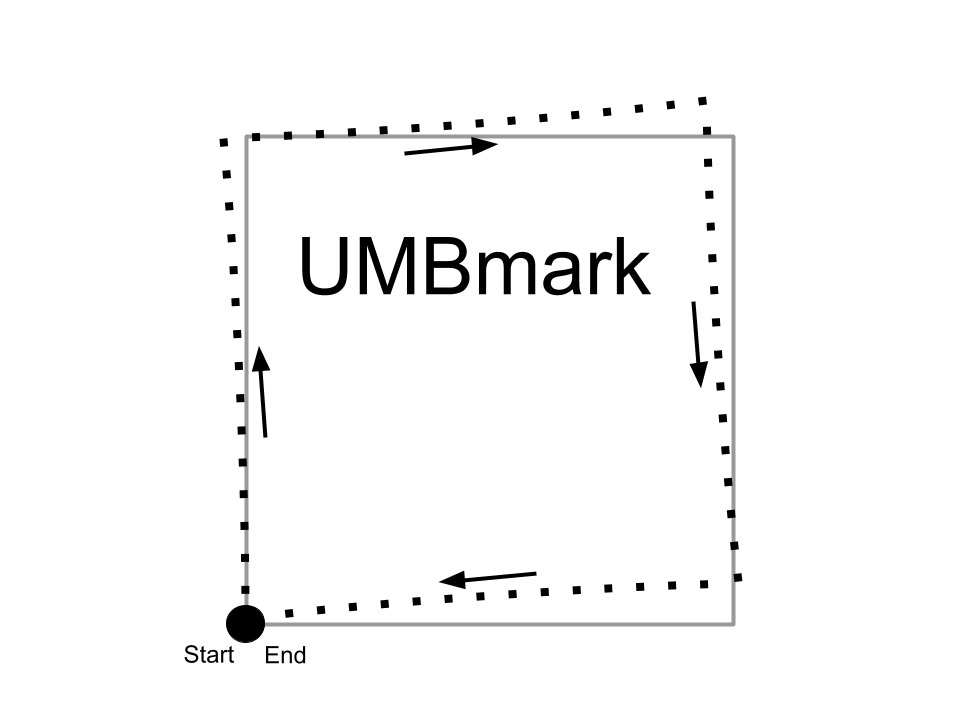
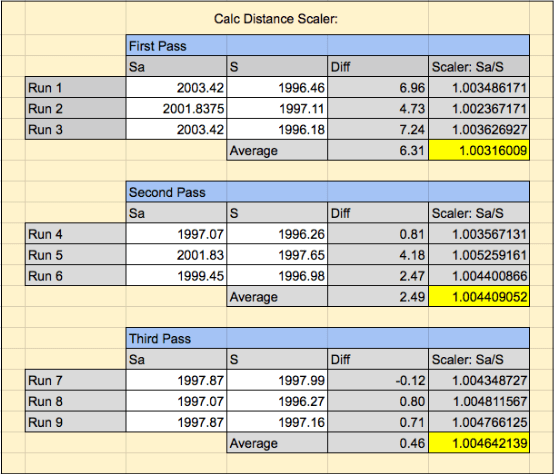
NavBot: Measuring and Correcting Systematic Errors with the UMBmark Test
Finally got a handle on dealing with NavBot’s key systematic errors. My ad hoc approach was proving very frustrating. The UMBmark method is simple to perform and gives great results.

Wallie The NavBot
Using the Zumo bot for dead reckoning was proving difficult due to its tracks. Decided to see if the original WallBot with its smaller wheels could perform better at navigation.

Zumo: Systematic Errors Dead Ahead
During the development of the NavBot I was forced to deal with and understand the systematic errors (and non-systematic errors) of the Zumo chassis. Maybe I’m expecting too much from a tracked-based dead-reckoning bot.
