Tag Archives: video

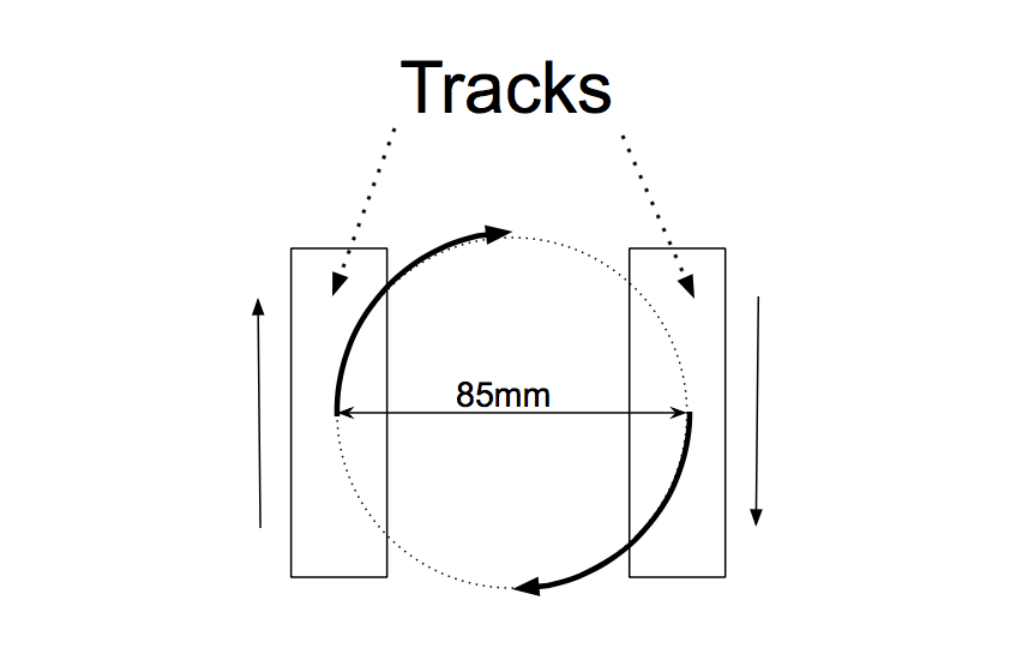
Quick and Dirty Dead Reckoning
Put together a quick and dirty dead reckoning experiment now that the encoders and PID controller are working. Very happy with the results, even if they are superficial.
PID Tuning For Zumo
With the encoders working it’s time to tune the PID controller for driving in straight lines.

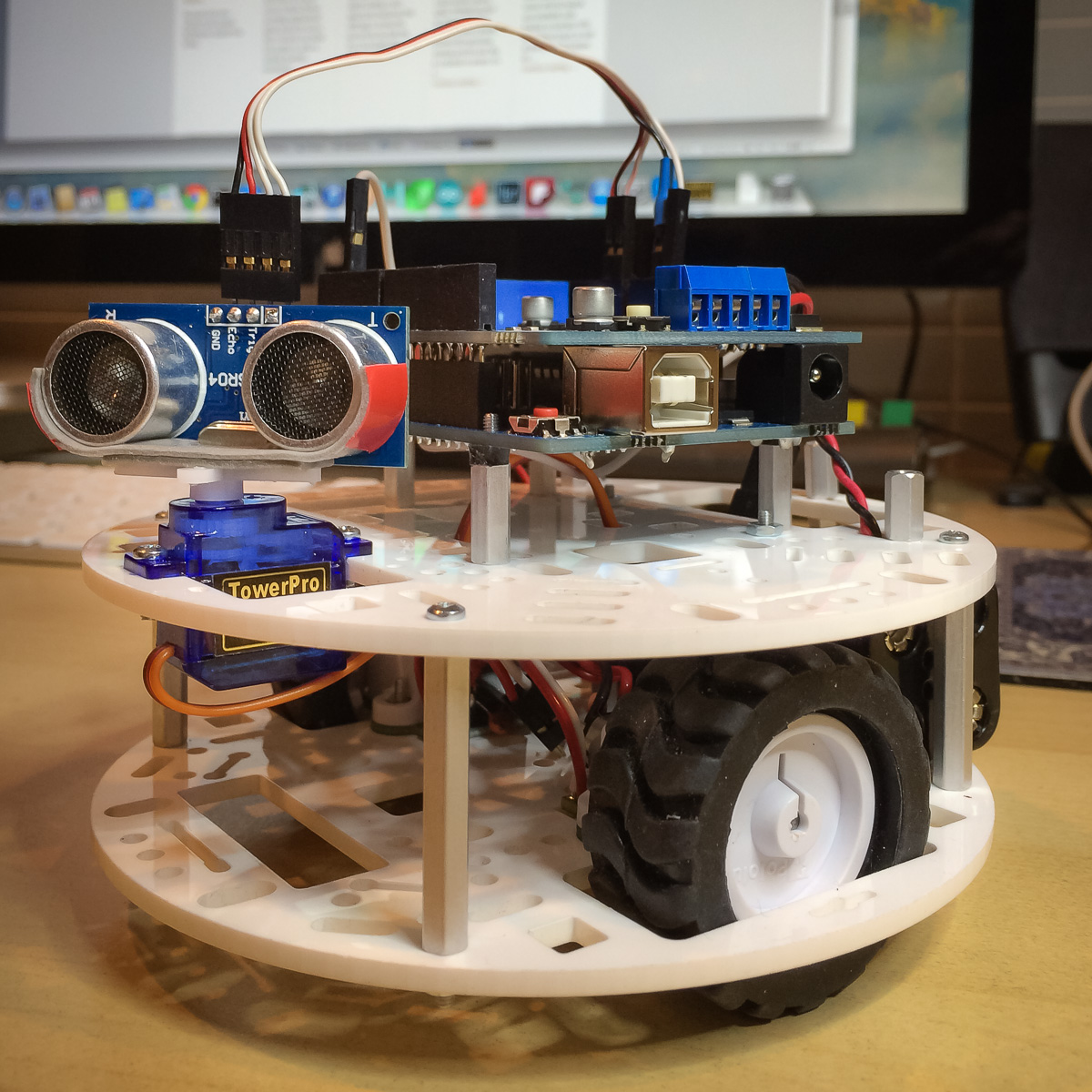
Building Zumo – Part IV
Finally completed the Zumo build, code and all. It was way more work than I bargained for.
Ended up adding a second microprocessor (The Trinket) to handle sensor and servo functions, implemented an I2C slave and wrangled new interrupt-driven servo code.

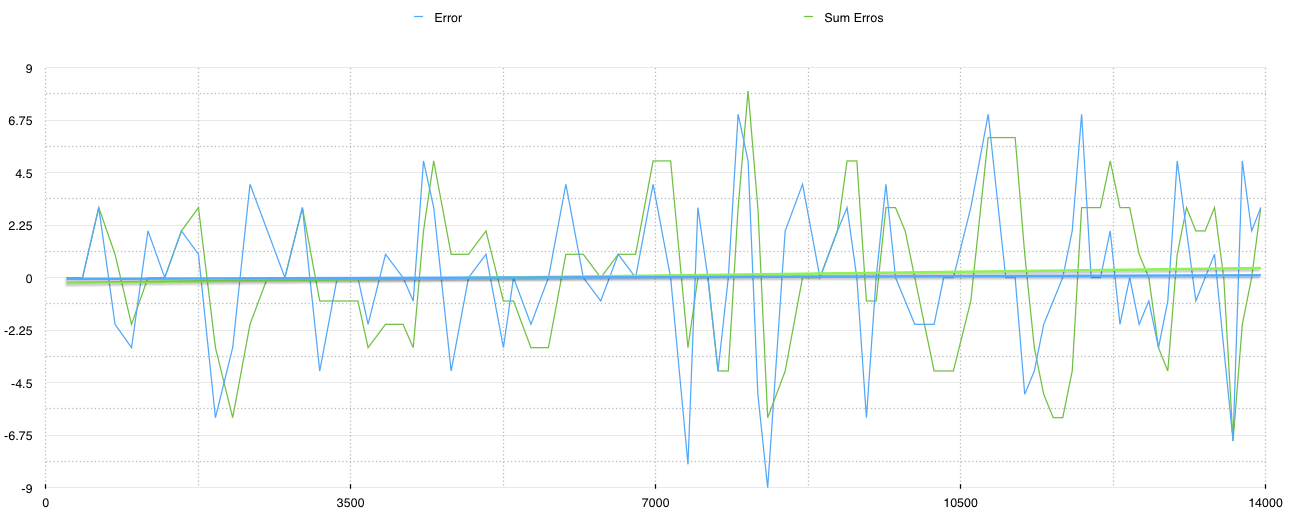
Data vs Reality
I’ve implemented a PID-based closed-loop system to ensure my bot travels in a straight line.
The data says it is going straight, however, in reality it seems to be deviating quite a bit.
Mighty confused.
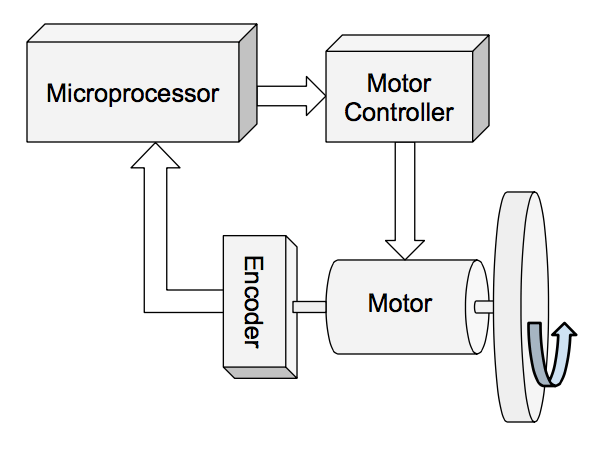
PID Controllers 101
My first introduction to PID controllers was in an article about a robotics dead-reckoning competition which the author won using a Lego Mindstorms creation called Peeves. This was back in 2001. It’s an interesting read. I had only recently purchased my own Mindstorms set and so was very impressed with the “toy” robot beating all the […]
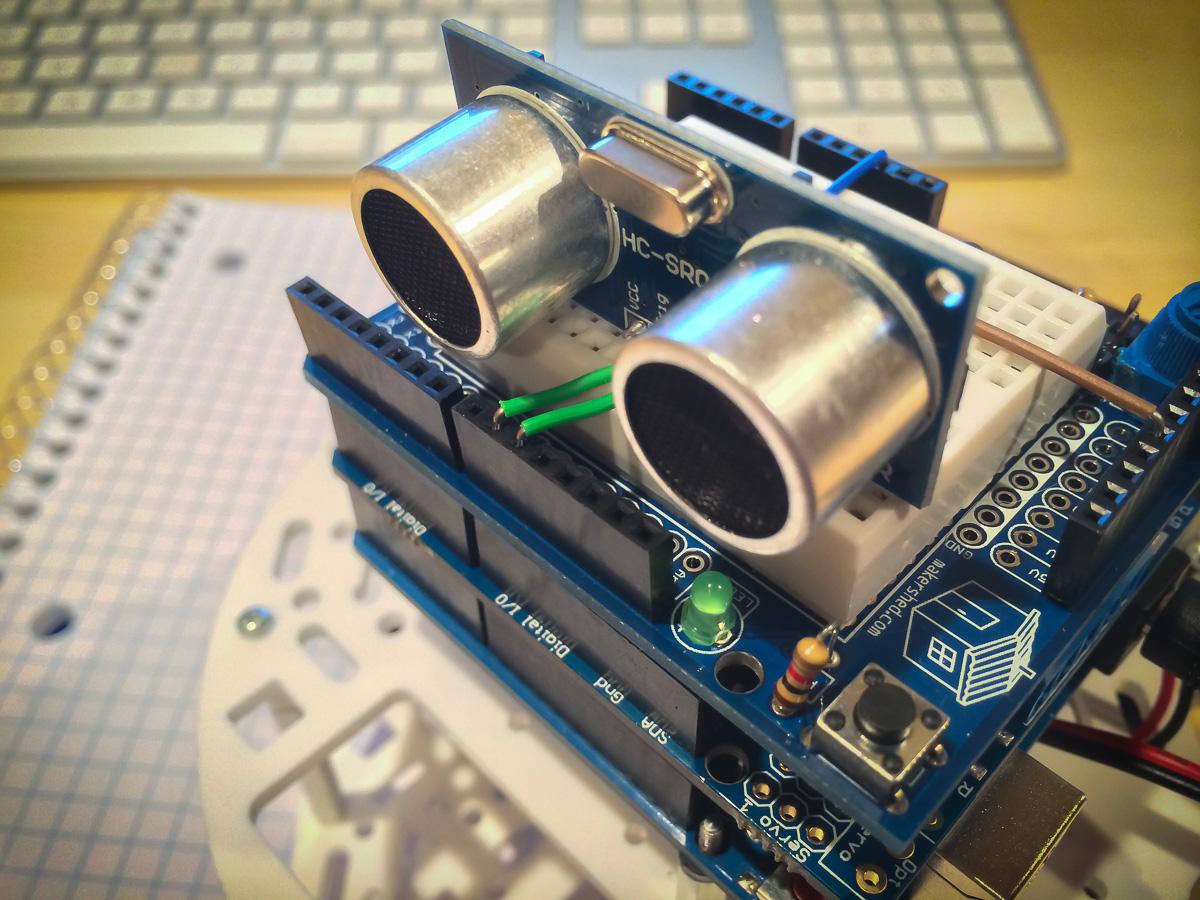
WallBot – Version 2
Next version of WallBot.
Mounted the sonic sensor onto a servo to provide better wall detection and handing. Managed to also slim down Wallie’s profile.
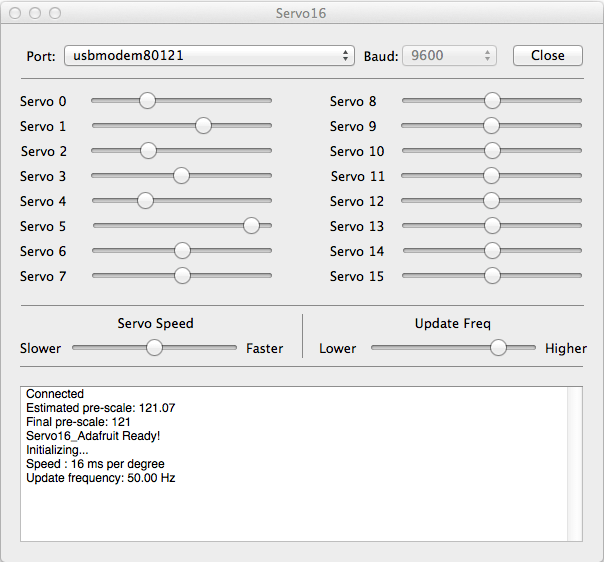
Servo16
Now that I have the servo shield working I went ahead and created my first OSX app to control the servos from my desk top. It’s a very simple app. There’s a slider for each of the 16 servos. Changing the sliders causes commands to be sent to the selected serial port. On the Arduino […]

Adafruit’s Servo Shield
Finally got the servo shield from Adafruit. The shield comes with the typical non-stackable male headers to interface with the Arduino board, as well as four 3×4 male headers for connecting up to 16 servos, and a two pin terminal block to provide power for those servos. I wanted to be able to stack other […]
