My first excursion in to mobile robotics. Did the typical “avoid walls” bot. All the code for this project is up on GitHub.
Version 1
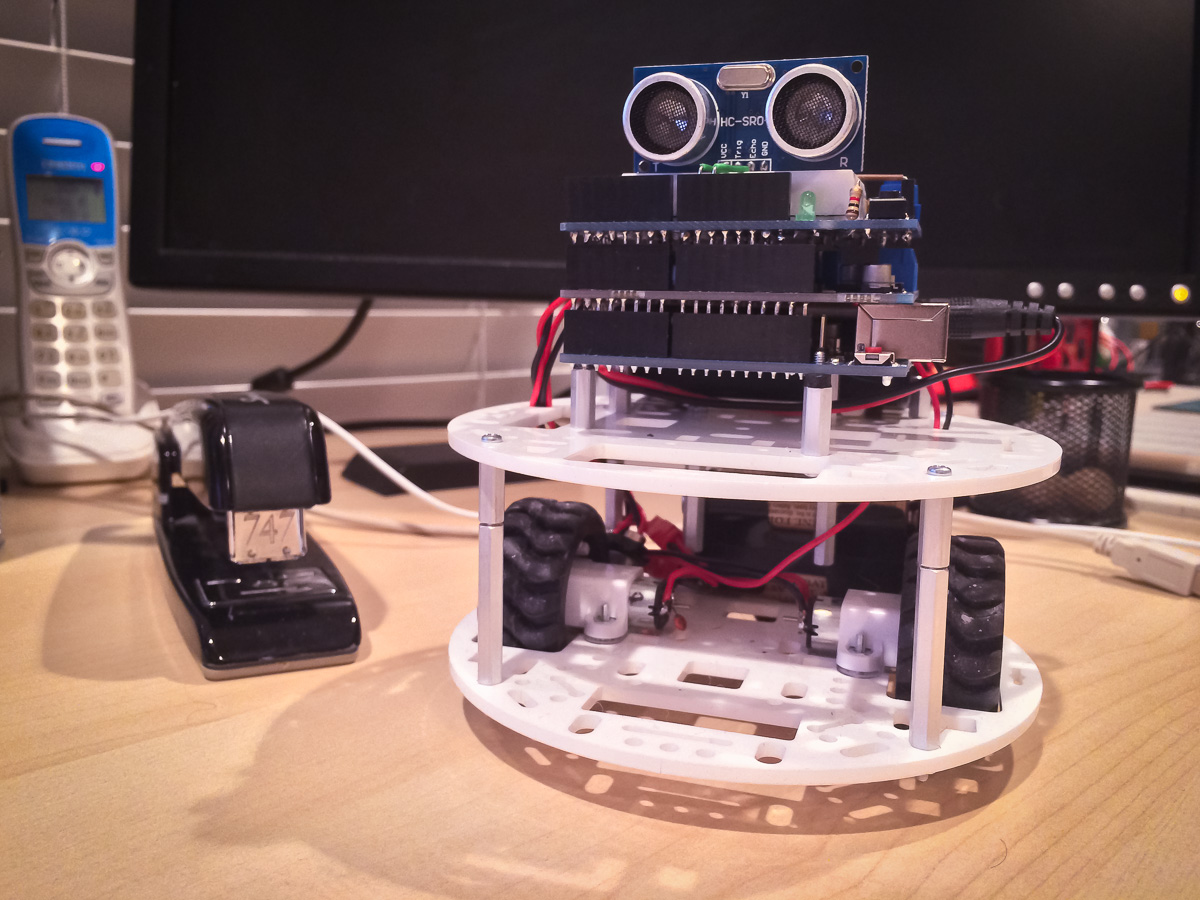
Initial build with sonic sensor to detect walls.
The Components:
- Arduino Uno
- Adafruit Motor Shield V2
- Maker Shield
- Pololu 5″ Robot Chassis
- Pololu Micro Metal Gearmotor Bracket Extended Pair
- Pololu Wheel 42x19mm Pair
- 100:1 Micro Metal Gearmotor HP with Extended Motor Shaft
- HC-SR04 Sonic Range Sensor
The Build: Version 1
The Code: Version 1 Code
The Video:
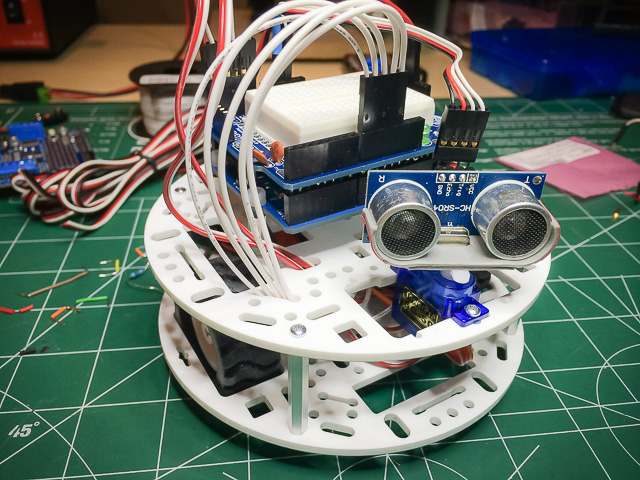
Version 2
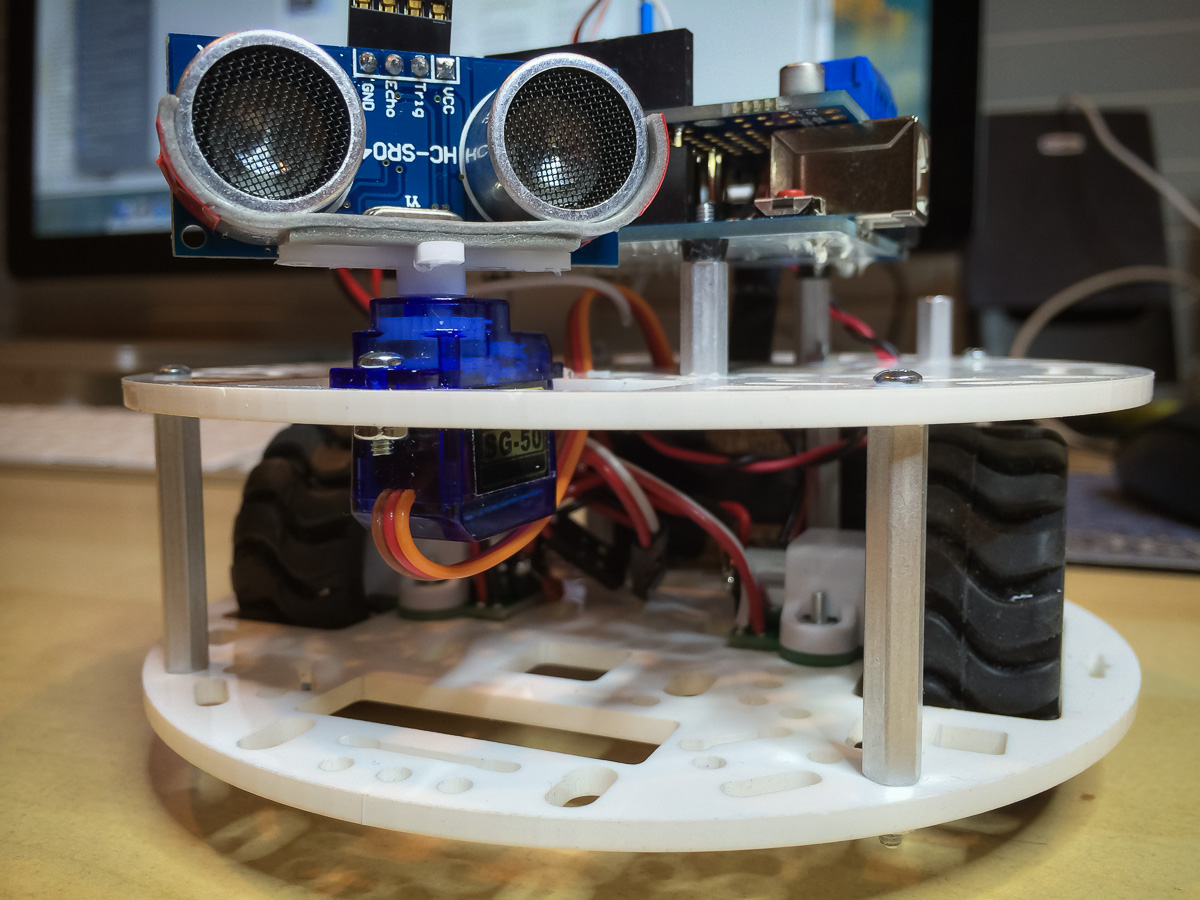
Put sensor on front mounted servo.
The Components:
- Arduino Uno
- Adafruit Motor Shield V2
- Maker Shield
- Pololu 5″ Robot Chassis
- Pololu Micro Metal Gearmotor Bracket Extended Pair
- Pololu Wheel 42x19mm Pair
- 100:1 Micro Metal Gearmotor HP with Extended Motor Shaft
- HC-SR04 Sonic Range Sensor
- TowerPro SG-50 Micro Servo
The Build: Version 2 Build
The Code: Version 2 Code
The Video:
Version 3
Added wheel encoders, new motor controller and PID control for traveling in straight lines.
The Components:
- Arduino Uno
- Pololu 5″ Robot Chassis
- Pololu Micro Metal Gearmotor Bracket Extended Pair
- Pololu Qik 2s9v1 Dual Serial Motor Controller
- Pololu Wheel 42x19mm Pair
- Encoder for Pololu Wheel 42x19mm x2
- 100:1 Micro Metal Gearmotor HP with Extended Motor Shaft
- HC-SR04 Sonic Range Sensor
- TowerPro SG-50 Micro Servo
The Build: Version 3 Build
Other: Adding encoders, PID Control for straight lines and Testing traction issues.
The Code: Version 3 Code
The Video:
Version 4 + 5

I moved over to new chassis. The Pololu Zumo.
The Components:
- Arduino Uno
- Zumo chassis
- Optical wheel encoders
- 100:1 Micro Metal Gearmotor HP with Extended Motor Shaft
- HC-SR04 Sonic Range Sensor
- Adafruit Trinket (Version 4)
- TowerPro SG-50 Micro Servo
The Build:
Other: PID Tuning
The Code: Version 4 & Version 5
The Video:

Hi Sir,
I wish to built the same wall bot as your Version 2. But I could not find the 2 header files below.
#include <SS_Servorator.h>
#include <SS_ServoTrim.h>
Can you kindly assist me on these.?
Newbie.
LikeLike
Servorator is here: https://github.com/solderspot/SS_Servorator
ServoTrim is here: https://github.com/solderspot/SS_ServoTrim
Have fun with the build.
LikeLike
Hi Sir, me the clueless,
I have basically built everything as your wallbot ver2 except i do not have the Adafruit motor controller shield Ver2.
I am using the older ver1 of motor controller shield.
I tried my best to rewrite the motor command base on AFMotor.h library. But the motor having trouble turning when it detect obstacle.
LikeLike
The code looks fine. What is the problem you are seeing? I can only guess that the motors might be wired incorrectly.
LikeLike