Tag Archives: dead reckoning
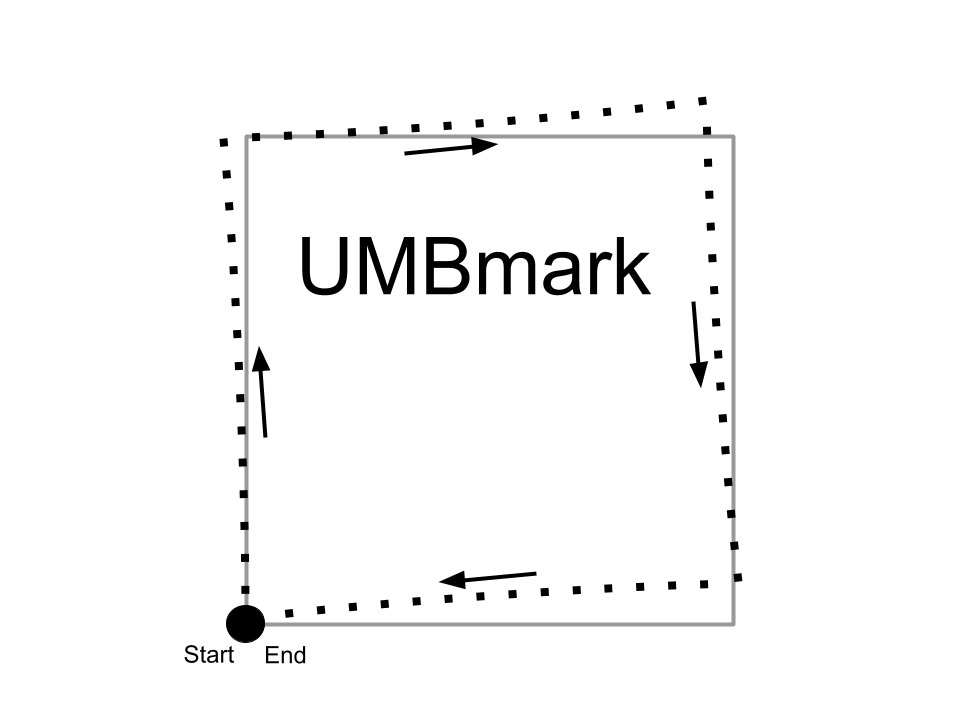
NavBot: Measuring and Correcting Systematic Errors with the UMBmark Test
Finally got a handle on dealing with NavBot’s key systematic errors. My ad hoc approach was proving very frustrating. The UMBmark method is simple to perform and gives great results.
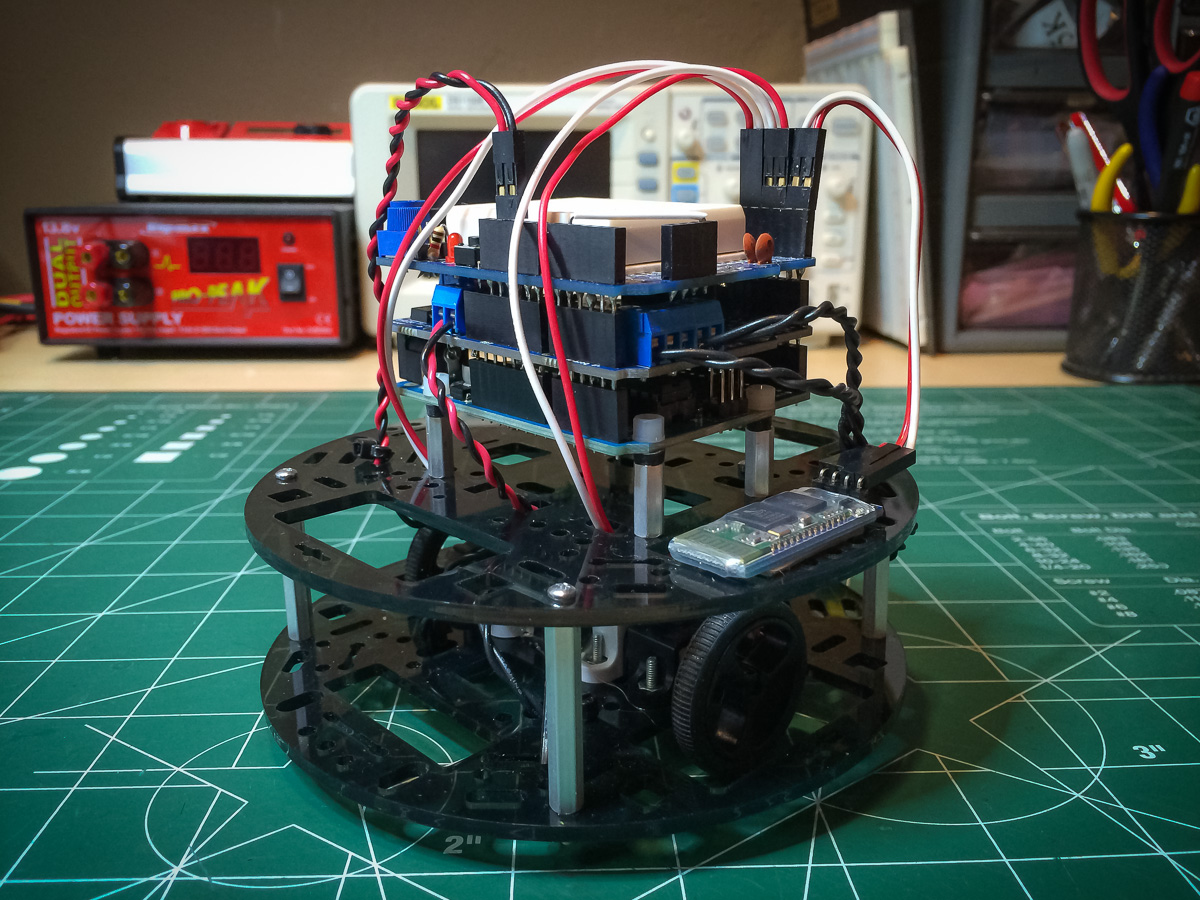
Black is the New NavBot
Created a new bot better suited for dead reckoning navigation. And the results?

Wallie The NavBot
Using the Zumo bot for dead reckoning was proving difficult due to its tracks. Decided to see if the original WallBot with its smaller wheels could perform better at navigation.

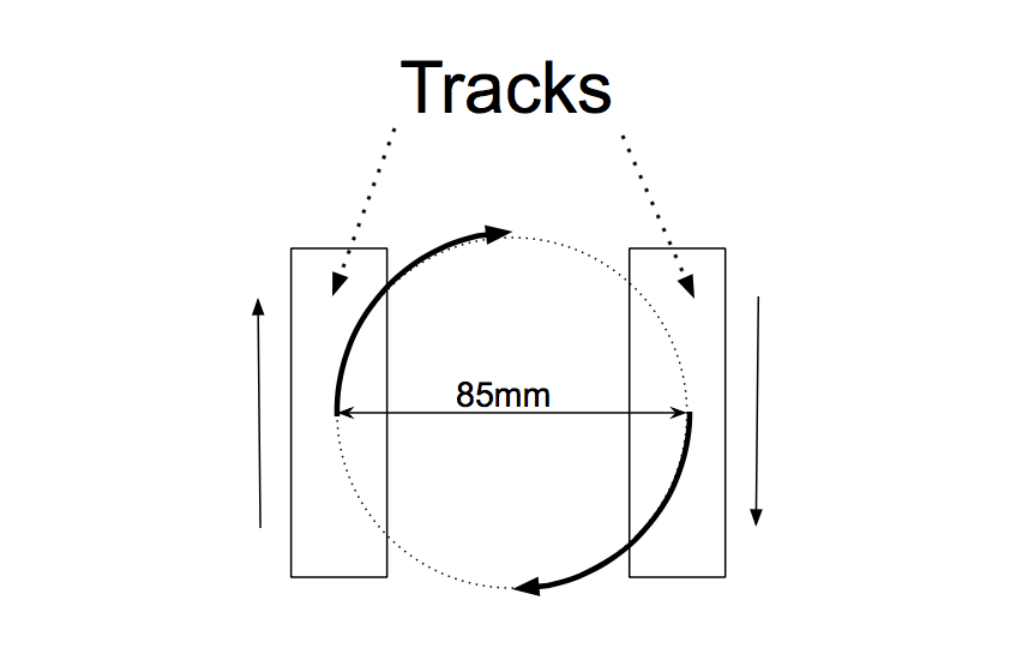
Zumo: Systematic Errors Dead Ahead
During the development of the NavBot I was forced to deal with and understand the systematic errors (and non-systematic errors) of the Zumo chassis. Maybe I’m expecting too much from a tracked-based dead-reckoning bot.


NavBot – Initial Software Design
Now that the WallBot has functioning wheel encoders I’m eager to evolve it from a simple wall-avoiding robot to one that can autonomously navigate its environment.
First I need to design how the software will work.
Quick and Dirty Dead Reckoning
Put together a quick and dirty dead reckoning experiment now that the encoders and PID controller are working. Very happy with the results, even if they are superficial.
