Tag Archives: pid controllers

NavBot: Pilot
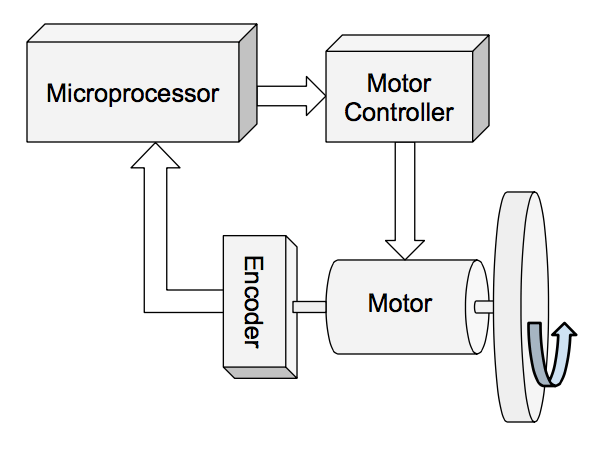
An overview of how the NavBot Pilot component works. This is still a work-in-progress but taking on solid form. I plan to explain the internal workings once I have it mostly functioning.
PID Tuning For Zumo
With the encoders working it’s time to tune the PID controller for driving in straight lines.

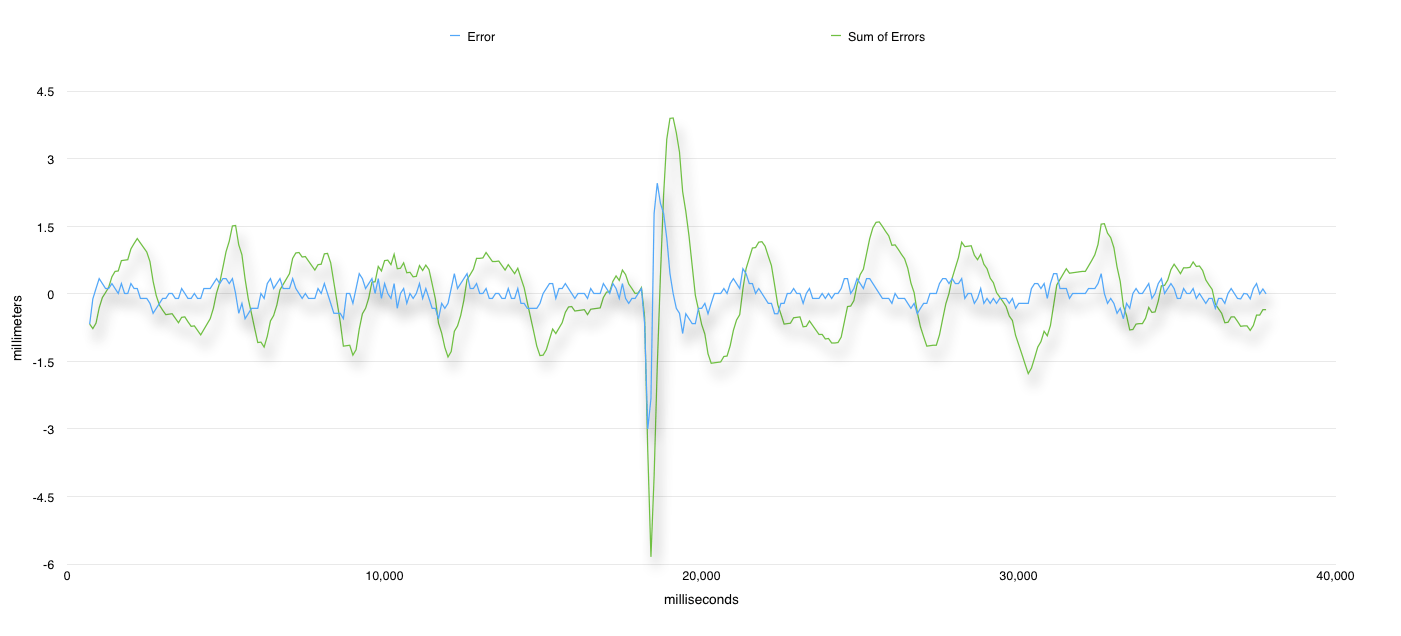
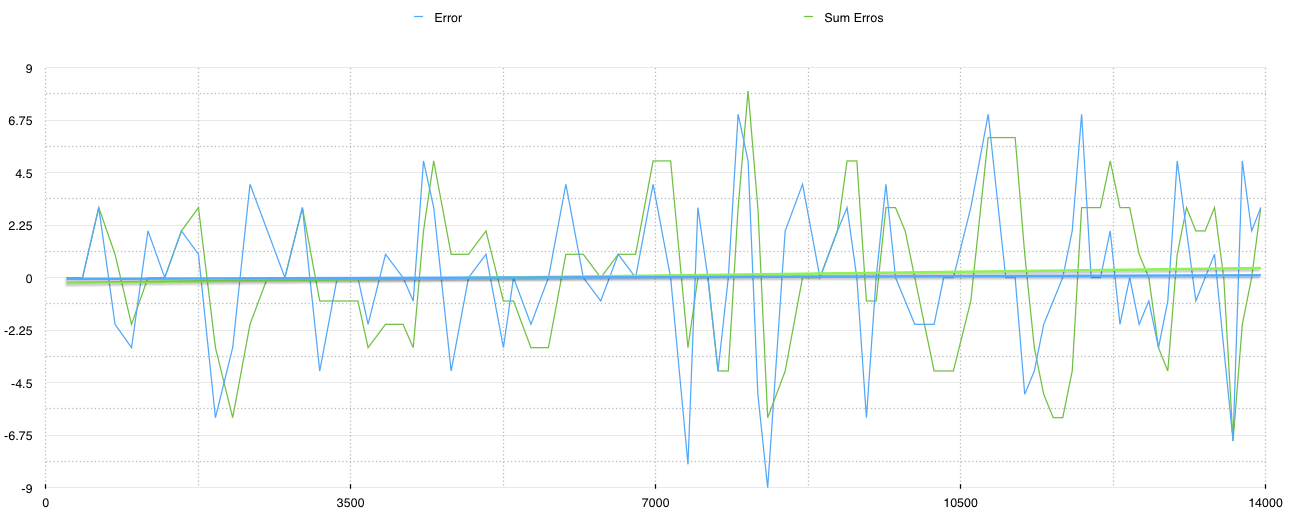
Data vs Reality
I’ve implemented a PID-based closed-loop system to ensure my bot travels in a straight line.
The data says it is going straight, however, in reality it seems to be deviating quite a bit.
Mighty confused.
PID Controllers 101
My first introduction to PID controllers was in an article about a robotics dead-reckoning competition which the author won using a Lego Mindstorms creation called Peeves. This was back in 2001. It’s an interesting read. I had only recently purchased my own Mindstorms set and so was very impressed with the “toy” robot beating all the […]
