Tag Archives: pololu
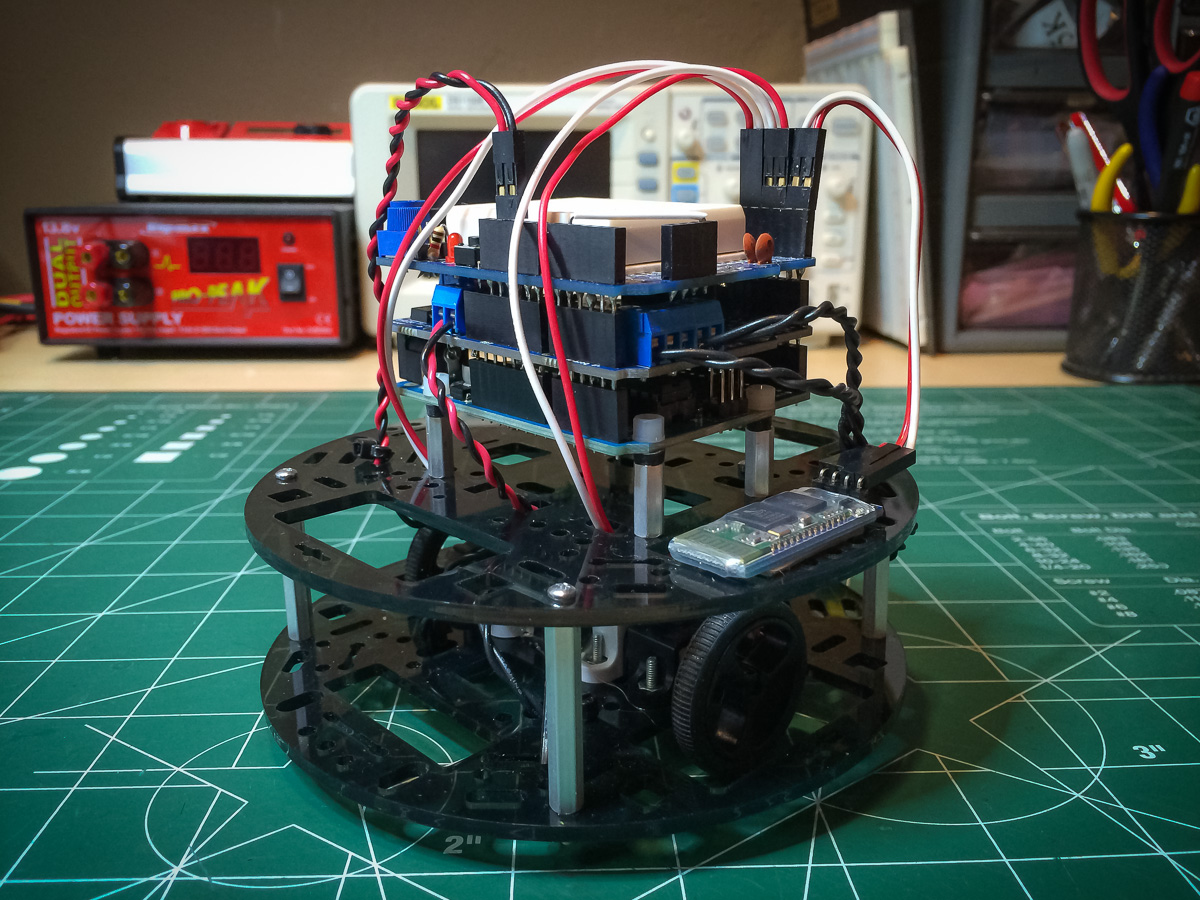
Black is the New NavBot
Created a new bot better suited for dead reckoning navigation. And the results?

Zumo: Systematic Errors Dead Ahead
During the development of the NavBot I was forced to deal with and understand the systematic errors (and non-systematic errors) of the Zumo chassis. Maybe I’m expecting too much from a tracked-based dead-reckoning bot.

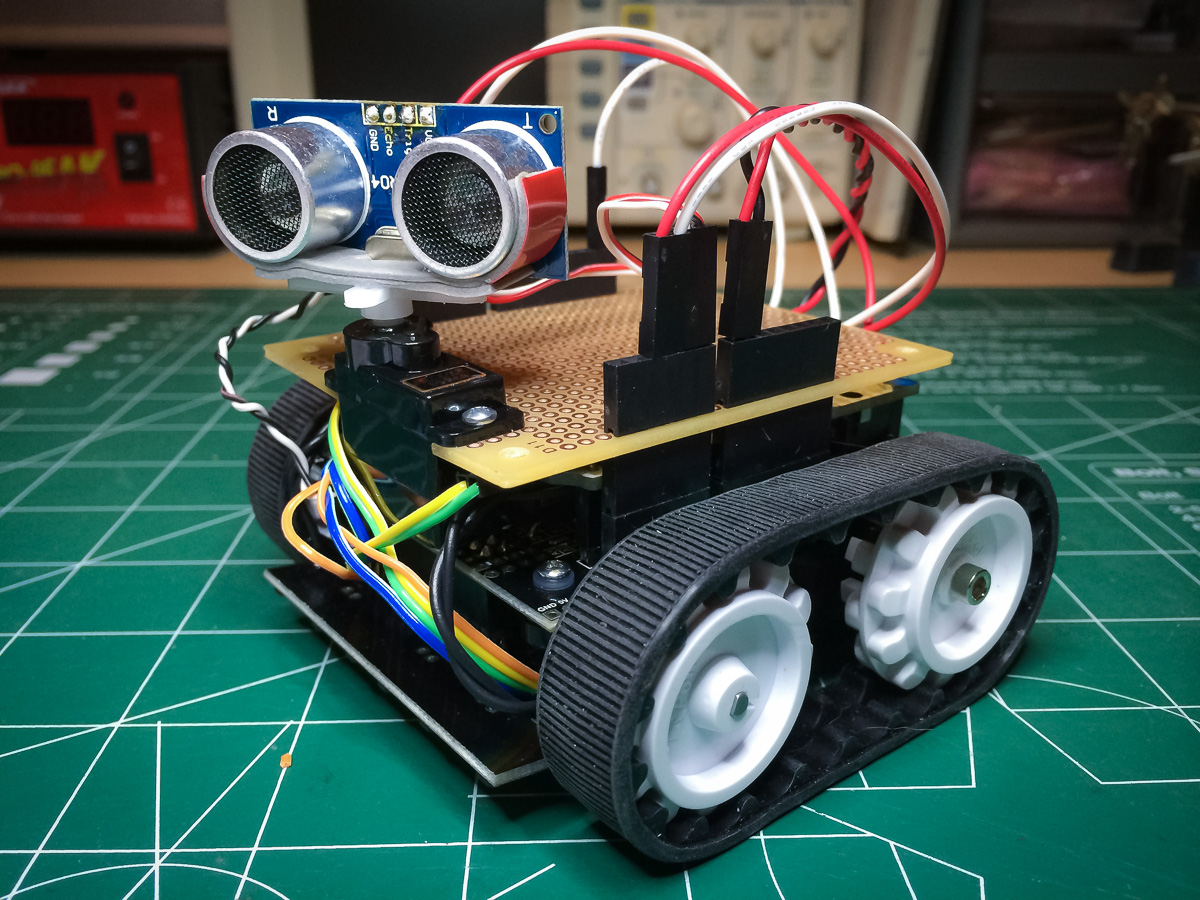
Building Zumo – Part IV
Finally completed the Zumo build, code and all. It was way more work than I bargained for.
Ended up adding a second microprocessor (The Trinket) to handle sensor and servo functions, implemented an I2C slave and wrangled new interrupt-driven servo code.
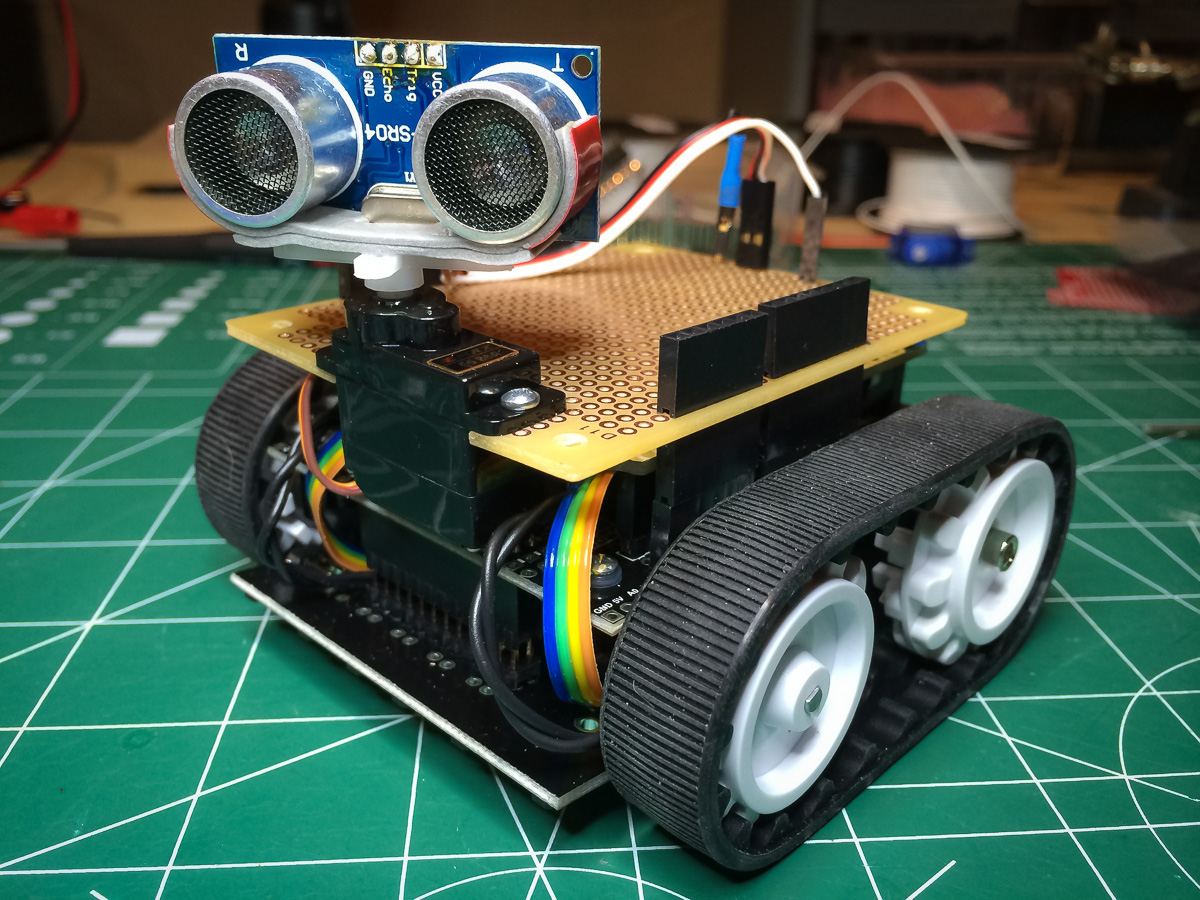
Building Zumo – Part III
Completed the Zumo hardware side and got the encoders working but then hit a road block trying to get the motors to turn…
Building Zumo – Part II
Did a little more work on the sumo type bot.
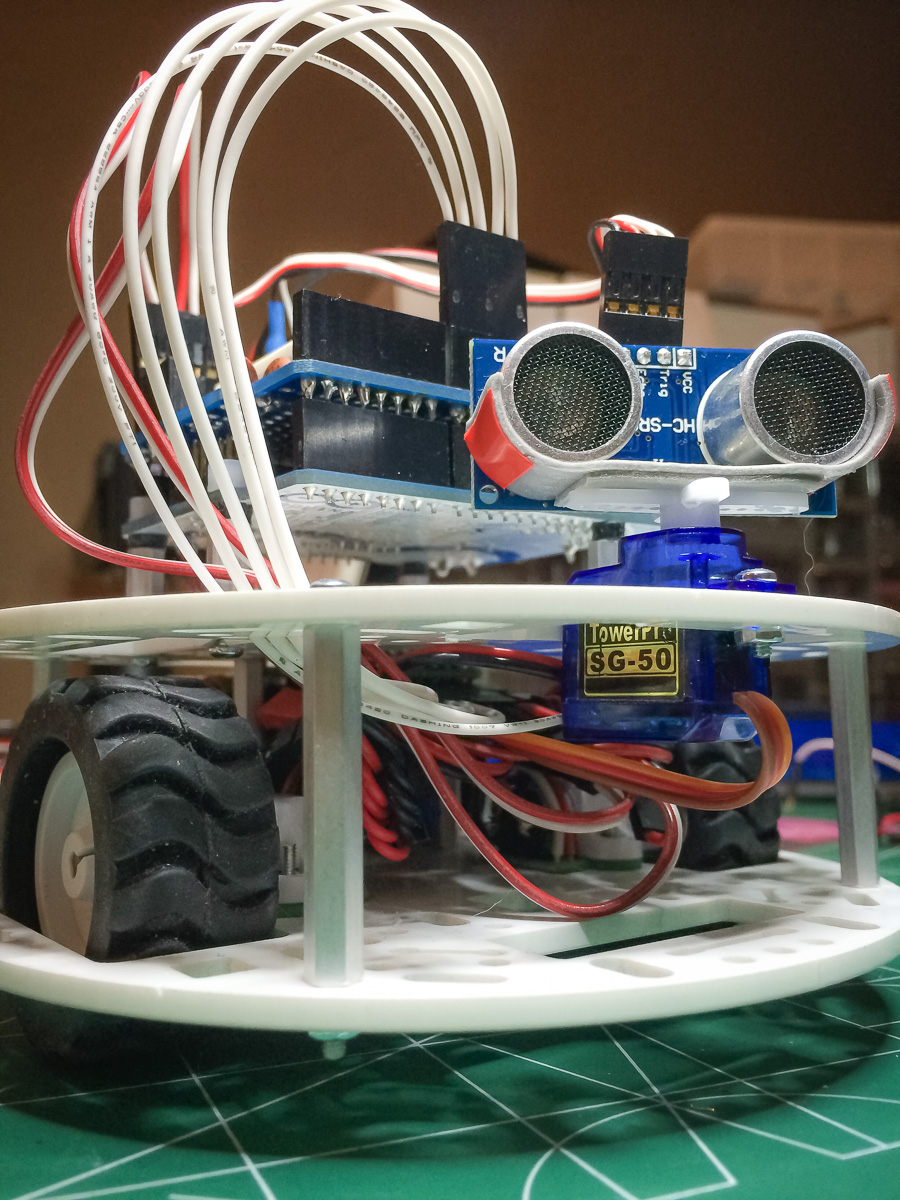
Added a perfboard with a mounted servo for a sweeping collision sensor.

Say Hello To My Little Friend – Zumo Part I
Decided to build the Pololu Zumo chassis with their optical encoders.
Still need to figure out a circuit to convert the encoders’ analog signal to digital.

Wheel Encoders For WallBot
Adding wheel encoders to WallBot ended up being more work than I thought. I ended up writing all the code from scratch but it meant I learnt a lot about encoders and timer interrupts on the microcontroller.
WallBot – Version 2.5
WallBot got a new motor controller and quadrature encoders.
Integrating the new motor controller raises some software issues….

Pololu Chassis + Motors
The start of my two-wheeled robot project: Building the chassis from Pololu.
