Category arduino

Moving Forward with NavBot
Now that the first version of NavBot is complete it is time to think about how to scale things up… and an 8 bit Atmel microcontroller is not the answer.
NavBot: Version 1
First true working version of the NavBot.
I show how you can get the code up and running on your own mobile robot, configure and calibrate it for errors and create your own waypoint based path sequences for the Pilot to execute.
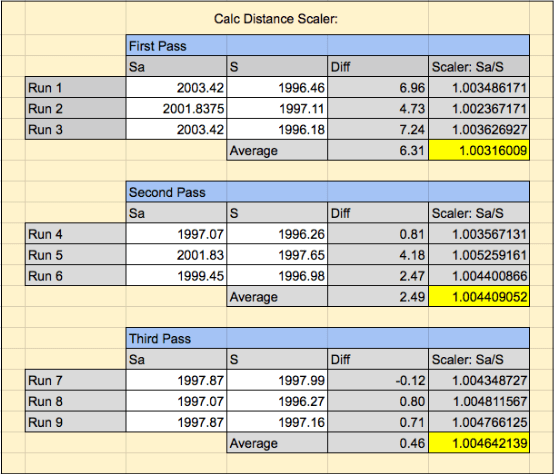
NavBot: Calibration
[This is a breakout post for NavBot: Version 1 where I show how to get the NavBot project to run on your own robot.] In a previous post I detailed some of the systematic errors typical for differential type robots and how to correct for them. In this post I’m simply going to show how […]

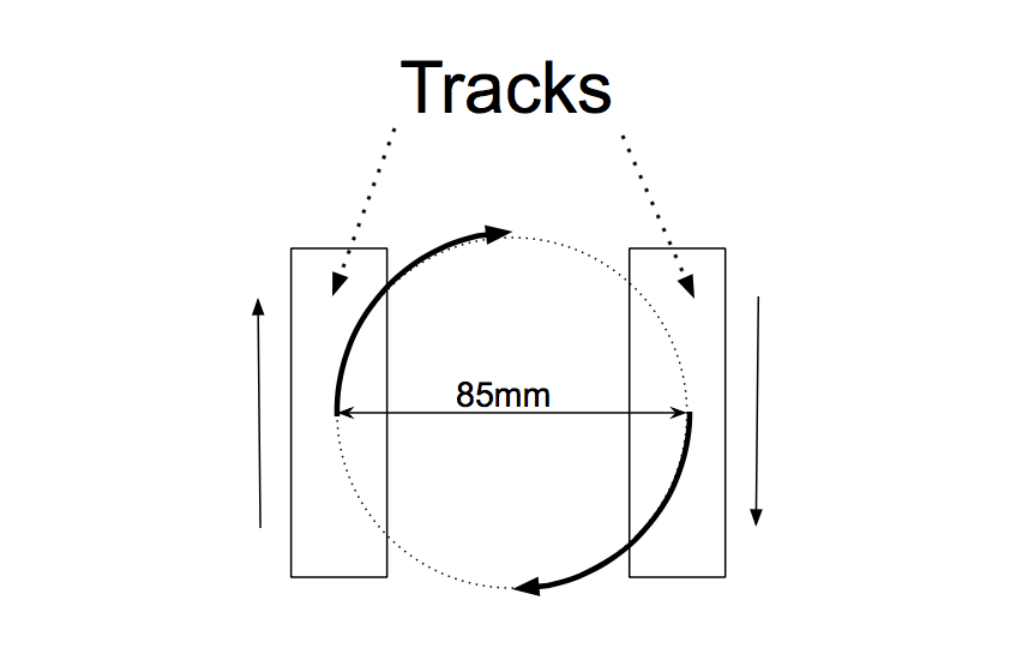
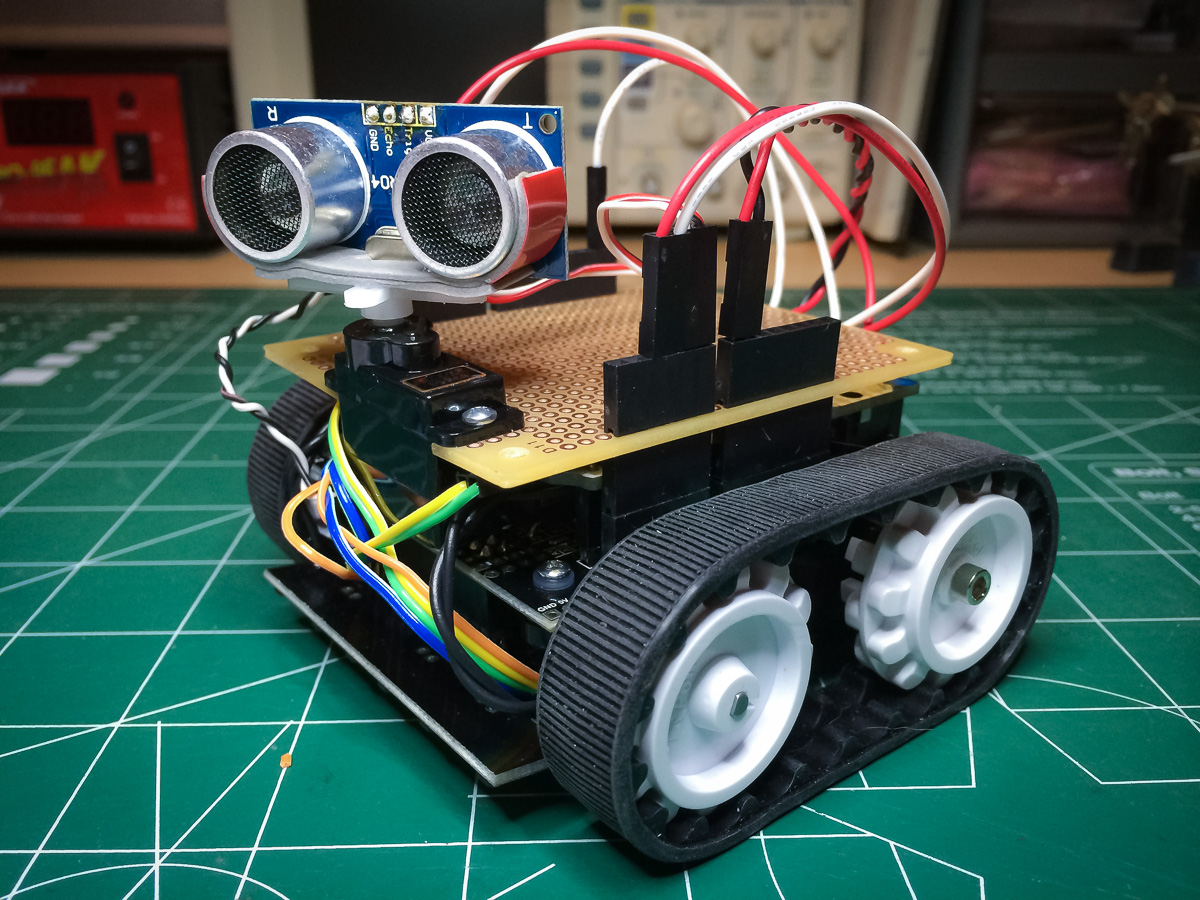
Wallie The NavBot
Using the Zumo bot for dead reckoning was proving difficult due to its tracks. Decided to see if the original WallBot with its smaller wheels could perform better at navigation.

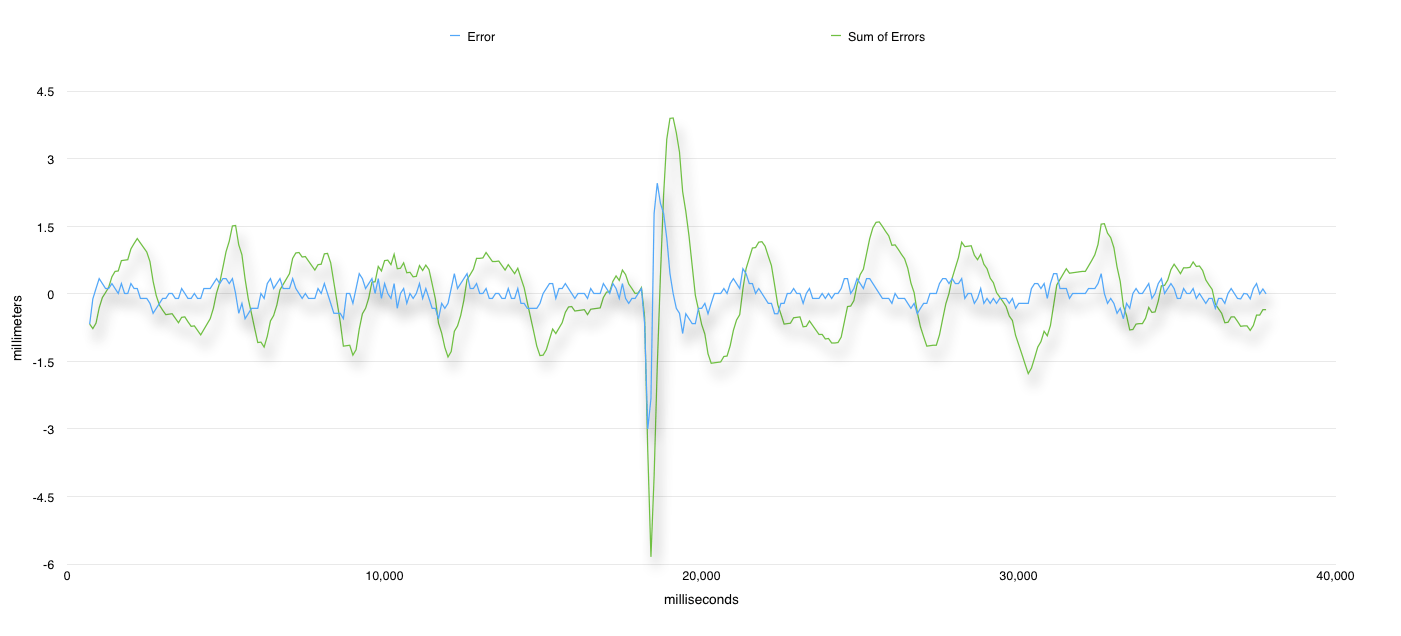
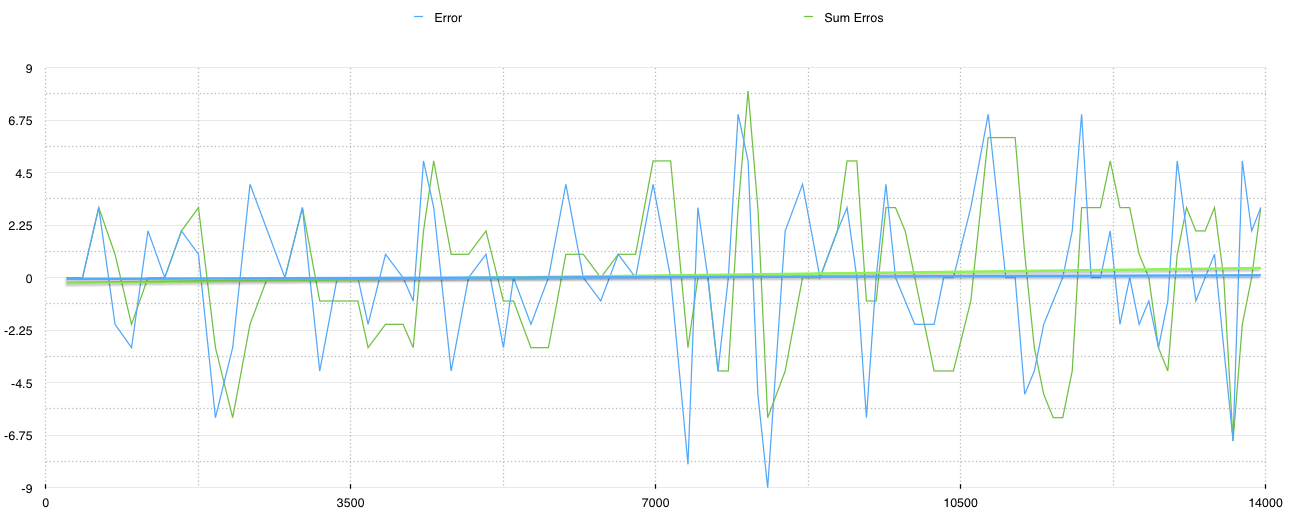
Quick and Dirty Dead Reckoning
Put together a quick and dirty dead reckoning experiment now that the encoders and PID controller are working. Very happy with the results, even if they are superficial.
PID Tuning For Zumo
With the encoders working it’s time to tune the PID controller for driving in straight lines.

Building Zumo – Part IV
Finally completed the Zumo build, code and all. It was way more work than I bargained for.
Ended up adding a second microprocessor (The Trinket) to handle sensor and servo functions, implemented an I2C slave and wrangled new interrupt-driven servo code.
Building Zumo – Part III
Completed the Zumo hardware side and got the encoders working but then hit a road block trying to get the motors to turn…
